การเหนี่ยวนำกำหนดคุณสมบัติขององค์ประกอบของวงจรไฟฟ้าเพื่อสะสมพลังงานของสนามแม่เหล็ก นอกจากนี้ยังเป็นการวัดความสัมพันธ์ระหว่างกระแสและสนามแม่เหล็ก นอกจากนี้ยังเปรียบเทียบกับความเฉื่อยของไฟฟ้า เช่นเดียวกับมวลที่วัดความเฉื่อยของวัตถุทางกล
เนื้อหา
ปรากฏการณ์ของการเหนี่ยวนำตนเอง
หากกระแสที่ไหลผ่านวงจรการนำมีการเปลี่ยนแปลงขนาดปรากฏการณ์ของการเหนี่ยวนำตนเองก็จะเกิดขึ้น ในกรณีนี้ ฟลักซ์แม่เหล็กที่ไหลผ่านวงจรจะเปลี่ยนไป และแรงเคลื่อนไฟฟ้าจะปรากฏที่ขั้วของวงจรปัจจุบัน ซึ่งเรียกว่าแรงเคลื่อนไฟฟ้าที่เหนี่ยวนำตัวเอง EMF นี้อยู่ตรงข้ามกับทิศทางของกระแสและเท่ากับ:
ε=-∆F/∆t=-L*(∆I/∆t)
เห็นได้ชัดว่า EMF ของการเหนี่ยวนำตัวเองเท่ากับอัตราการเปลี่ยนแปลงของฟลักซ์แม่เหล็กที่เกิดจากการเปลี่ยนแปลงของกระแสที่ไหลผ่านวงจรและเป็นสัดส่วนกับอัตราการเปลี่ยนแปลงของกระแสด้วย สัมประสิทธิ์สัดส่วนระหว่าง EMF ของการเหนี่ยวนำตัวเองและอัตราการเปลี่ยนแปลงของกระแสเรียกว่าการเหนี่ยวนำและแสดงด้วย L ค่านี้เป็นค่าบวกเสมอ และมีหน่วย SI เท่ากับ 1 เฮนรี (1 H) เศษส่วนเศษส่วนยังใช้ - millihenry และ microhenry เราสามารถพูดถึงความเหนี่ยวนำของ 1 Henry ได้หากการเปลี่ยนแปลงของกระแส 1 แอมแปร์ทำให้เกิด EMF ที่เหนี่ยวนำตัวเองเป็น 1 โวลต์ วงจรไม่เพียงแต่มีความเหนี่ยวนำเท่านั้น แต่ยังมีตัวนำที่แยกจากกัน เช่นเดียวกับขดลวด ซึ่งสามารถแสดงเป็นชุดของวงจรที่เชื่อมต่อแบบอนุกรม
ตัวเหนี่ยวนำเก็บพลังงานซึ่งสามารถคำนวณได้เป็น W=L*I2/2 โดยที่:
- W—พลังงาน, เจ;
- L – ตัวเหนี่ยวนำ H;
- I คือกระแสในขดลวด A
และนี่คือพลังงานที่ได้สัดส่วนโดยตรงกับความเหนี่ยวนำของขดลวด
สำคัญ! ในทางวิศวกรรม การเหนี่ยวนำยังเป็นอุปกรณ์ที่ใช้เก็บสนามไฟฟ้า องค์ประกอบจริงที่ใกล้เคียงที่สุดกับคำจำกัดความดังกล่าวคือตัวเหนี่ยวนำ
สูตรทั่วไปสำหรับการคำนวณค่าความเหนี่ยวนำของขดลวดกายภาพมีรูปแบบที่ซับซ้อนและไม่สะดวกในการคำนวณในทางปฏิบัติ มีประโยชน์ที่ต้องจำไว้ว่าการเหนี่ยวนำเป็นสัดส่วนกับจำนวนรอบ เส้นผ่านศูนย์กลางของขดลวด และขึ้นอยู่กับรูปทรงเรขาคณิต นอกจากนี้การเหนี่ยวนำยังได้รับผลกระทบจากการซึมผ่านของแม่เหล็กของแกนกลางที่มีขดลวดอยู่ แต่กระแสที่ไหลผ่านการหมุนจะไม่ได้รับผลกระทบ ในการคำนวณค่าความเหนี่ยวนำ ทุกครั้งที่คุณจำเป็นต้องอ้างอิงสูตรข้างต้นสำหรับการออกแบบเฉพาะ ดังนั้นสำหรับขดลวดทรงกระบอกคุณสมบัติหลักของมันจึงคำนวณโดยสูตร:
L=μ*μ*(น2*เอส/ลิตร),
ที่ไหน:
- μคือการซึมผ่านของแม่เหล็กสัมพัทธ์ของแกนขดลวด
- ไมโคร – ค่าคงที่แม่เหล็ก 1.26*10-6 H/m;
- N คือจำนวนรอบ;
- S คือพื้นที่ของขดลวด
- l คือความยาวเรขาคณิตของขดลวด
ในการคำนวณค่าความเหนี่ยวนำของขดลวดทรงกระบอกและขดลวดที่มีรูปร่างอื่น ควรใช้โปรแกรมเครื่องคิดเลข รวมทั้งเครื่องคิดเลขออนไลน์ด้วย
อนุกรมและการเชื่อมต่อแบบขนานของตัวเหนี่ยวนำ
ตัวเหนี่ยวนำสามารถเชื่อมต่อแบบอนุกรมหรือแบบขนานได้ชุดที่มีคุณสมบัติใหม่
การเชื่อมต่อแบบขนาน
เมื่อขดลวดต่อขนานกัน แรงดันขององค์ประกอบทั้งหมดจะเท่ากัน และกระแส (ตัวแปร) มีการกระจายผกผันกับการเหนี่ยวนำขององค์ประกอบ
- U=U1= คุณ2= คุณ3;
- ฉัน=ฉัน1+ฉัน2+ฉัน3.
ความเหนี่ยวนำทั้งหมดของวงจรถูกกำหนดเป็น 1/L=1/L1+1/ลิตร2+1/ลิตร3. สูตรนี้ใช้ได้กับองค์ประกอบจำนวนเท่าใดก็ได้ และสำหรับสองขดลวดจะลดความซับซ้อนให้อยู่ในรูปแบบ L=L1*หลี่2/(หลี่1+หล2). เห็นได้ชัดว่าการเหนี่ยวนำที่ได้จะน้อยกว่าการเหนี่ยวนำขององค์ประกอบที่มีค่าน้อยที่สุด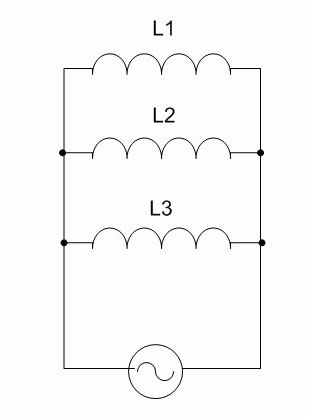
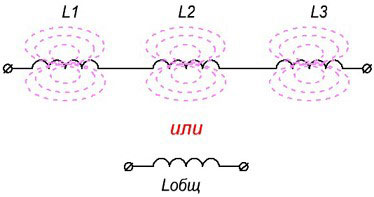
การเชื่อมต่อแบบอนุกรม
ด้วยการเชื่อมต่อประเภทนี้ กระแสเดียวกันจะไหลผ่านวงจรที่ประกอบด้วยขดลวด และแรงดันไฟฟ้า (ตัวแปร!) ในแต่ละองค์ประกอบของวงจรจะกระจายตามสัดส่วนการเหนี่ยวนำของแต่ละองค์ประกอบ:
- U=U1+คุณ2+คุณ3;
- ฉัน=ฉัน1=ฉัน2=ฉัน3.
ความเหนี่ยวนำทั้งหมดเท่ากับผลรวมของการเหนี่ยวนำทั้งหมด และจะมากกว่าค่าเหนี่ยวนำขององค์ประกอบที่มีค่ามากที่สุด ดังนั้นการเชื่อมต่อดังกล่าวจึงถูกใช้หากจำเป็นเพื่อให้เกิดการเหนี่ยวนำเพิ่มขึ้น
สำคัญ! เมื่อเชื่อมต่อขดลวดในชุดหรือแบตเตอรี่แบบขนาน สูตรการคำนวณจะถูกต้องเฉพาะในกรณีที่ไม่รวมอิทธิพลซึ่งกันและกันของสนามแม่เหล็กขององค์ประกอบซึ่งกันและกัน (การป้องกัน ระยะทางไกล ฯลฯ) หากมีอิทธิพล มูลค่ารวมของการเหนี่ยวนำจะขึ้นอยู่กับตำแหน่งสัมพัทธ์ของขดลวด
ปัญหาในทางปฏิบัติและการออกแบบของตัวเหนี่ยวนำ
ในทางปฏิบัติใช้การออกแบบตัวเหนี่ยวนำต่างๆ อุปกรณ์สามารถทำได้หลายวิธีทั้งนี้ขึ้นอยู่กับวัตถุประสงค์และขอบเขตการใช้งาน แต่จะต้องคำนึงถึงผลกระทบที่เกิดขึ้นในขดลวดจริงด้วย
ปัจจัยด้านคุณภาพของตัวเหนี่ยวนำ
นอกจากการเหนี่ยวนำแล้ว คอยล์จริงยังมีพารามิเตอร์อีกหลายตัว และสิ่งที่สำคัญที่สุดคือปัจจัยด้านคุณภาพ ค่านี้กำหนดการสูญเสียในขดลวดและขึ้นอยู่กับ:
- การสูญเสียโอห์มมิกในลวดที่คดเคี้ยว (ยิ่งมีความต้านทานมากเท่าใดปัจจัยด้านคุณภาพก็จะยิ่งต่ำลง);
- การสูญเสียอิเล็กทริกในฉนวนลวดและโครงขดลวด
- การสูญเสียหน้าจอ
- การสูญเสียหลัก
ปริมาณทั้งหมดเหล่านี้เป็นตัวกำหนดความต้านทานการสูญเสีย และปัจจัยด้านคุณภาพเป็นค่าที่ไม่มีมิติเท่ากับ Q=ωL/Rlosses โดยที่:
- ω = 2*π*F - ความถี่วงกลม;
- L - ตัวเหนี่ยวนำ;
- ωLคือค่ารีแอกแตนซ์ของขดลวด
เราสามารถพูดได้ว่าปัจจัยด้านคุณภาพเท่ากับอัตราส่วนของความต้านทานปฏิกิริยา (อุปนัย) ต่อแอกทีฟ ในอีกด้านหนึ่ง ด้วยความถี่ที่เพิ่มขึ้น ตัวเศษจะเพิ่มขึ้น แต่ในขณะเดียวกัน เนื่องจากผลกระทบของผิวหนัง ความต้านทานการสูญเสียก็เพิ่มขึ้นเช่นกัน เนื่องจากส่วนตัดขวางที่มีประโยชน์ของเส้นลวดลดลง
เอฟเฟกต์หน้าจอ
เพื่อลดอิทธิพลของวัตถุแปลกปลอม เช่นเดียวกับสนามไฟฟ้าและสนามแม่เหล็ก และอิทธิพลร่วมกันขององค์ประกอบผ่านสนามเหล่านี้ มักจะวางขดลวด (โดยเฉพาะอย่างยิ่งความถี่สูง) ไว้ในหน้าจอ นอกจากผลที่เป็นประโยชน์แล้ว การป้องกันยังทำให้ปัจจัยด้านคุณภาพของขดลวดลดลง การเหนี่ยวนำลดลง และเพิ่มความจุของกาฝาก ยิ่งไปกว่านั้น ยิ่งผนังหน้าจอใกล้กับจุดหมุนของคอยล์มากเท่าไหร่ ผลกระทบที่เป็นอันตรายก็จะยิ่งสูงขึ้น ดังนั้นขดลวดที่มีฉนวนหุ้มจึงมักทำขึ้นโดยสามารถปรับพารามิเตอร์ได้
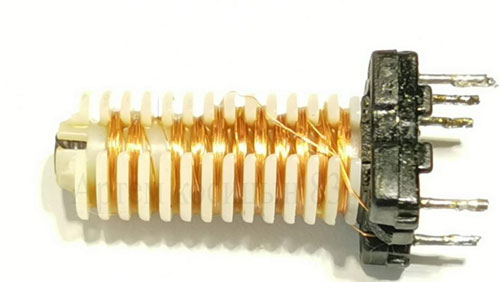
ตัวเหนี่ยวนำทริมเมอร์
ในบางกรณี จำเป็นต้องตั้งค่าตัวเหนี่ยวนำบนไซต์ให้ถูกต้องหลังจากเชื่อมต่อคอยล์กับองค์ประกอบวงจรอื่นๆ เพื่อชดเชยค่าเบี่ยงเบนของพารามิเตอร์ในระหว่างการปรับจูน ด้วยเหตุนี้จึงใช้วิธีการต่างๆ (การสลับก๊อกของตาแหน่ง ฯลฯ ) แต่วิธีที่แม่นยำและราบรื่นที่สุดคือการปรับจูนโดยใช้แกนหลัก มันทำในรูปแบบของแกนเกลียวซึ่งสามารถขันเข้าและออกภายในเฟรมเพื่อปรับความเหนี่ยวนำของขดลวด

ตัวเหนี่ยวนำตัวแปร (variometer)
ในกรณีที่จำเป็นต้องปรับการเหนี่ยวนำหรือคัปปลิ้งแบบอุปนัยอย่างรวดเร็ว จะใช้คอยส์ที่มีการออกแบบแตกต่างกัน ประกอบด้วยขดลวดสองอัน - เคลื่อนย้ายได้และยึดอยู่กับที่ ความเหนี่ยวนำทั้งหมดเท่ากับผลรวมของการเหนี่ยวนำของขดลวดทั้งสองและการเหนี่ยวนำร่วมกันระหว่างพวกเขา
โดยการเปลี่ยนตำแหน่งสัมพัทธ์ของคอยล์หนึ่งไปยังอีกขดลวดหนึ่ง ค่ารวมของการเหนี่ยวนำจะถูกปรับ อุปกรณ์ดังกล่าวเรียกว่า Variometer และมักใช้ในอุปกรณ์สื่อสารเพื่อปรับวงจรเรโซแนนซ์ในกรณีที่ไม่สามารถใช้ตัวเก็บประจุแบบแปรผันได้ด้วยเหตุผลบางประการการออกแบบวาริออมิเตอร์ค่อนข้างเทอะทะ ซึ่งจำกัดขอบเขต

การเหนี่ยวนำในรูปของเกลียวพิมพ์
ขดลวดที่มีการเหนี่ยวนำขนาดเล็กสามารถทำเป็นเกลียวของตัวนำพิมพ์ ข้อดีของการออกแบบนี้คือ:
- ความสามารถในการผลิต
- การทำซ้ำของพารามิเตอร์สูง
ข้อเสีย ได้แก่ ความเป็นไปไม่ได้ของการปรับจูนอย่างละเอียดในระหว่างการปรับและความยากลำบากในการรับค่าการเหนี่ยวนำขนาดใหญ่ - ยิ่งการเหนี่ยวนำสูงเท่าใด ขดลวดก็จะยิ่งกินเนื้อที่บนกระดานมากขึ้นเท่านั้น

ม้วนแผลแบบแบ่งส่วน
ความเหนี่ยวนำที่ไม่มีความจุอยู่บนกระดาษเท่านั้น ด้วยการใช้งานทางกายภาพของคอยล์ใด ๆ ความจุอินเตอร์เทิร์นของกาฝากจะเกิดขึ้นทันที สิ่งนี้เป็นอันตรายในหลายกรณี ความจุของกาฝากจะเพิ่มขึ้นตามความจุของวงจร LC ซึ่งช่วยลดความถี่เรโซแนนซ์และปัจจัยด้านคุณภาพของระบบออสซิลเลเตอร์ นอกจากนี้ขดลวดยังมีความถี่เรโซแนนซ์ซึ่งกระตุ้นปรากฏการณ์ที่ไม่พึงประสงค์
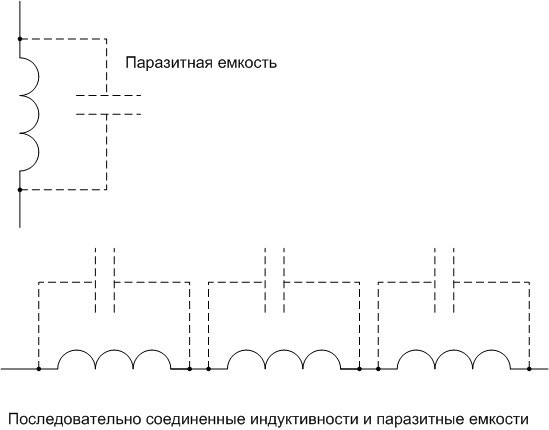
มีการใช้วิธีการต่างๆ เพื่อลดความจุของกาฝาก วิธีที่ง่ายที่สุดคือการเหนี่ยวนำที่คดเคี้ยวในรูปแบบของส่วนที่เชื่อมต่อแบบอนุกรมหลายส่วน ด้วยการรวมนี้ การเหนี่ยวนำจะเพิ่มขึ้น และความจุรวมจะลดลง
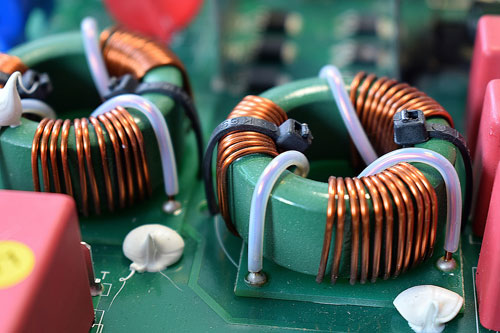
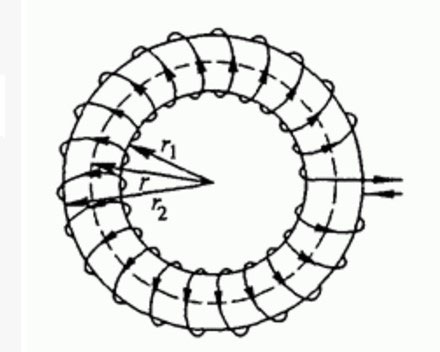
ตัวเหนี่ยวนำบนแกน toroidal
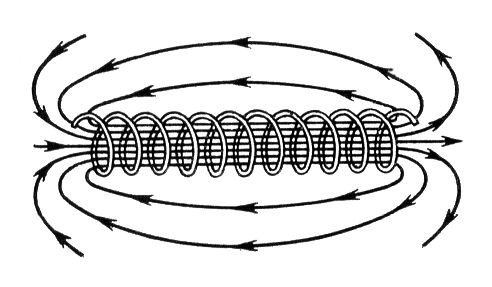
เส้นสนามแม่เหล็กของตัวเหนี่ยวนำทรงกระบอกถูกลากผ่านด้านในของขดลวด (หากมีแกนกลาง ให้ทะลุผ่านเข้าไป) และปิดจากภายนอกผ่านอากาศ ข้อเท็จจริงนี้มีข้อเสียหลายประการ:
- การเหนี่ยวนำจะลดลง
- ลักษณะของขดลวดนั้นคล้อยตามการคำนวณน้อยกว่า
- วัตถุใดๆ ที่นำเข้าสู่สนามแม่เหล็กภายนอกจะเปลี่ยนพารามิเตอร์ของขดลวด (ความเหนี่ยวนำ ความจุกาฝาก การสูญเสีย ฯลฯ) ดังนั้นในหลายกรณีจึงจำเป็นต้องมีการป้องกัน
ขดลวดพันบนแกน toroidal (ในรูปของวงแหวนหรือโดนัท) ส่วนใหญ่ปราศจากข้อบกพร่องเหล่านี้ เส้นแม่เหล็กผ่านเข้าไปในแกนกลางในรูปแบบของวงปิด ซึ่งหมายความว่าวัตถุภายนอกแทบไม่มีผลกระทบต่อพารามิเตอร์ของการพันขดลวดบนแกนดังกล่าว และการออกแบบดังกล่าวไม่จำเป็นต้องมีการป้องกัน ความเหนี่ยวนำยังเพิ่มขึ้น สิ่งอื่น ๆ ที่เท่าเทียมกัน และคุณลักษณะต่างๆ จะคำนวณได้ง่ายกว่า
ข้อเสียของขดลวดที่พันบนโทริ ได้แก่ ความเป็นไปไม่ได้ในการปรับความเหนี่ยวนำอย่างราบรื่นในจุดนั้น ปัญหาอีกประการหนึ่งคือความเข้มแรงงานสูงและความสามารถในการผลิตของขดลวดต่ำ อย่างไรก็ตาม สิ่งนี้ใช้ได้กับองค์ประกอบอุปนัยทั้งหมดโดยทั่วไป ในระดับมากหรือน้อย
นอกจากนี้ ข้อเสียทั่วไปของการใช้ตัวเหนี่ยวนำทางกายภาพก็คือน้ำหนักและขนาดที่สูง ความน่าเชื่อถือค่อนข้างต่ำ และการบำรุงรักษาต่ำ
ดังนั้นในเทคโนโลยีพวกเขาจึงพยายามกำจัดส่วนประกอบอุปนัย แต่สิ่งนี้ไม่สามารถทำได้เสมอไป ดังนั้นส่วนประกอบที่คดเคี้ยวจะถูกนำมาใช้ทั้งในอนาคตอันใกล้และในระยะกลาง
บทความที่คล้ายกัน: