การมอดูเลตเป็นกระบวนการทางไฟฟ้าที่ไม่เป็นเชิงเส้น ซึ่งพารามิเตอร์ของสัญญาณหนึ่ง (ผู้ให้บริการ) จะถูกเปลี่ยนโดยใช้สัญญาณอื่น (มอดูเลต, ข้อมูล) ในเทคโนโลยีการสื่อสาร ความถี่ แอมพลิจูด และการปรับเฟสมีการใช้กันอย่างแพร่หลาย ในเทคโนโลยีอิเล็กทรอนิกส์กำลังและไมโครโปรเซสเซอร์ การมอดูเลตความกว้างพัลส์ได้กลายเป็นที่แพร่หลาย
เนื้อหา
PWM คืออะไร (การปรับความกว้างพัลส์)
ด้วยการมอดูเลตความกว้างพัลส์ของสัญญาณดั้งเดิม แอมพลิจูด ความถี่ และเฟสของสัญญาณดั้งเดิมยังคงไม่เปลี่ยนแปลง ระยะเวลา (ความกว้าง) ของพัลส์สี่เหลี่ยมอาจเปลี่ยนแปลงได้ภายใต้การกระทำของสัญญาณข้อมูล ในวรรณคดีทางเทคนิคภาษาอังกฤษ คำย่อว่า PWM - การมอดูเลตความกว้างพัลส์
PWM ทำงานอย่างไร
สัญญาณมอดูเลตความกว้างพัลส์ถูกสร้างขึ้นในสองวิธี:
- อนาล็อก;
- ดิจิทัล.
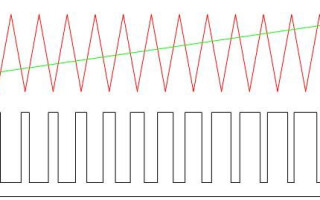
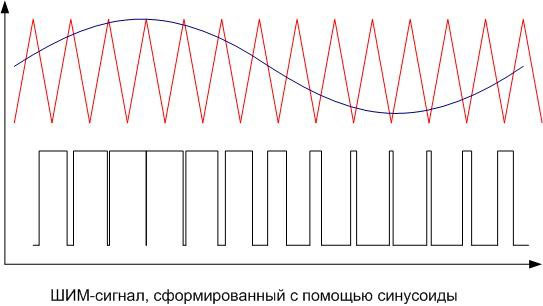
ด้วยวิธีการแบบอะนาล็อกในการสร้างสัญญาณ PWM ผู้ให้บริการในรูปแบบของสัญญาณฟันเลื่อยหรือสามเหลี่ยมจะถูกป้อนเข้าสู่การพลิกกลับ อินพุตตัวเปรียบเทียบและข้อมูลเกี่ยวกับการไม่กลับด้าน หากระดับพาหะในทันทีสูงกว่าสัญญาณมอดูเลต เอาต์พุตของตัวเปรียบเทียบจะเป็นศูนย์ หากต่ำกว่า - หนึ่ง เอาต์พุตเป็นสัญญาณแบบไม่ต่อเนื่องที่มีความถี่สอดคล้องกับความถี่ของสามเหลี่ยมพาหะหรือเลื่อย และความยาวพัลส์เป็นสัดส่วนกับระดับของแรงดันมอดูเลต
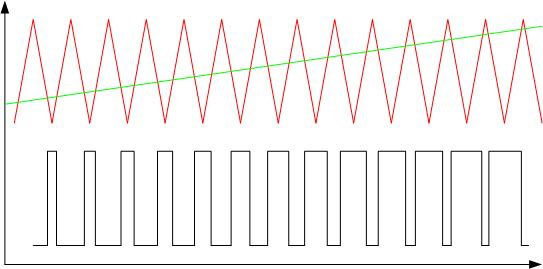
ตัวอย่างเช่น การมอดูเลตความกว้างพัลส์ของสัญญาณรูปสามเหลี่ยมจะเพิ่มขึ้นเป็นเส้นตรง ระยะเวลาของพัลส์เอาท์พุตเป็นสัดส่วนกับระดับของสัญญาณเอาท์พุต
ตัวควบคุม PWM แบบอะนาล็อกยังมีอยู่ในรูปแบบของไมโครเซอร์กิตสำเร็จรูปซึ่งมีการติดตั้งวงจรเปรียบเทียบและวงจรการสร้างพาหะ มีอินพุตสำหรับเชื่อมต่อองค์ประกอบการตั้งค่าความถี่ภายนอกและส่งสัญญาณข้อมูล สัญญาณจะถูกลบออกจากเอาต์พุตที่ควบคุมคีย์ต่างประเทศอันทรงพลัง นอกจากนี้ยังมีอินพุตสำหรับความคิดเห็น ซึ่งจำเป็นสำหรับการรักษาพารามิเตอร์การควบคุมที่ตั้งไว้ ตัวอย่างเช่นคือชิป TL494 สำหรับกรณีที่พลังของผู้บริโภคค่อนข้างน้อย ตัวควบคุม PWM พร้อมคีย์ในตัวจะพร้อมใช้งาน คีย์ภายในของไมโครเซอร์กิต LM2596 ออกแบบมาสำหรับกระแสไฟสูงสุด 3 แอมแปร์
วิธีการแบบดิจิทัลดำเนินการโดยใช้ไมโครเซอร์กิตหรือไมโครโปรเซสเซอร์แบบพิเศษ ความยาวพัลส์ถูกควบคุมโดยโปรแกรมภายใน ไมโครคอนโทรลเลอร์หลายตัว รวมถึง PIC และ AVR ยอดนิยม มีโมดูลในตัวสำหรับการใช้งานฮาร์ดแวร์ของ PWM "บนบอร์ด" เพื่อรับสัญญาณ PWM คุณต้องเปิดใช้งานโมดูลและตั้งค่าพารามิเตอร์การทำงานหากไม่มีโมดูลดังกล่าว PWM สามารถจัดระเบียบโดยใช้ซอฟต์แวร์ได้อย่างหมดจดซึ่งไม่ใช่เรื่องยาก วิธีนี้ให้พลังและอิสระมากขึ้นผ่านการใช้เอาต์พุตที่ยืดหยุ่น แต่ใช้ทรัพยากรตัวควบคุมมากกว่า
ลักษณะของสัญญาณ PWM
ลักษณะสำคัญของสัญญาณ PWM คือ:
- แอมพลิจูด (U);
- ความถี่ (ฉ);
- รอบการทำงาน (S) หรือรอบการทำงาน D
แอมพลิจูดเป็นโวลต์ถูกกำหนดขึ้นอยู่กับโหลด จะต้องจัดหาแรงดันไฟฟ้าที่กำหนดของผู้บริโภค
ความถี่ของสัญญาณที่มอดูเลตโดยความกว้างพัลส์ถูกเลือกจากข้อควรพิจารณาต่อไปนี้:
- ยิ่งความถี่สูง ความแม่นยำในการควบคุมก็จะยิ่งสูงขึ้น
- ความถี่ต้องไม่ต่ำกว่าเวลาตอบสนองของอุปกรณ์ที่ควบคุมโดย PWM มิฉะนั้นจะเกิดการกระเพื่อมของพารามิเตอร์ควบคุม
- ยิ่งความถี่สูง การสูญเสียการสลับก็จะยิ่งสูงขึ้น เกิดจากการที่เวลาเปลี่ยนของกุญแจมีจำกัด ในสถานะล็อค แรงดันไฟของแหล่งจ่ายทั้งหมดลดลงบนองค์ประกอบหลัก แต่แทบไม่มีกระแสไฟ ในสถานะเปิด กระแสโหลดเต็มจะไหลผ่านคีย์ แต่แรงดันตกคร่อมมีขนาดเล็ก เนื่องจากความต้านทานของปริมาณงานอยู่ที่สองสามโอห์ม ในทั้งสองกรณี การกระจายพลังงานจะเล็กน้อย การเปลี่ยนจากสถานะหนึ่งไปอีกสถานะหนึ่งเกิดขึ้นอย่างรวดเร็ว แต่ไม่ใช่ในทันที ในกระบวนการปลดล็อค - ล็อค แรงดันไฟฟ้าขนาดใหญ่จะลดลงบนองค์ประกอบเปิดบางส่วนและในขณะเดียวกันก็มีกระแสที่สำคัญไหลผ่าน ในเวลานี้ พลังงานที่กระจายไปมีค่าสูง ช่วงนี้เป็นช่วงสั้นๆ ที่สำคัญไม่มีเวลา warm up มากนักแต่ด้วยความถี่ที่เพิ่มขึ้นของช่วงเวลาดังกล่าวต่อหน่วยเวลา ความถี่จะเพิ่มขึ้นและการสูญเสียความร้อนก็เพิ่มขึ้น ดังนั้น ในการสร้างคีย์ การใช้องค์ประกอบที่รวดเร็วจึงเป็นสิ่งสำคัญ
- เมื่อขับรถ มอเตอร์ไฟฟ้า ความถี่จะต้องถูกนำออกจากพื้นที่ที่ได้ยินแก่บุคคล - 25 kHz ขึ้นไป เพราะที่ความถี่ PWM ที่ต่ำกว่าจะเกิดเสียงหวีดอันไม่พึงประสงค์
ข้อกำหนดเหล่านี้มักขัดแย้งกัน ดังนั้นการเลือกความถี่ในบางกรณีจึงเป็นเรื่องที่ประนีประนอม
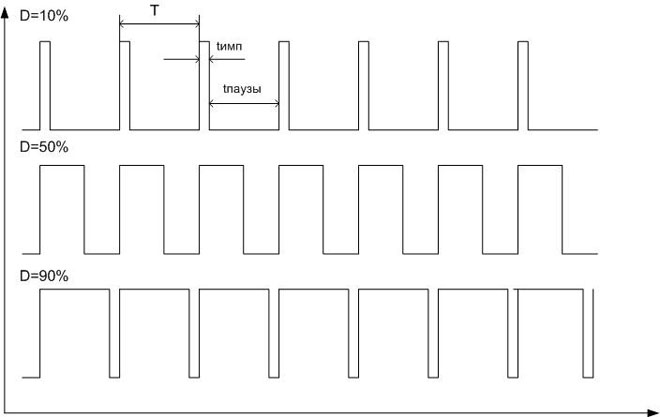
ค่ามอดูเลตเป็นตัวกำหนดลักษณะของรอบการทำงาน เนื่องจากอัตราการเกิดซ้ำของพัลส์คงที่ ระยะเวลาของคาบจึงคงที่ด้วย (T=1/f) คาบประกอบด้วยแรงกระตุ้นและการหยุดชั่วคราวซึ่งมีระยะเวลาตามลำดับ tภูตผีปีศาจ และ tหยุดชั่วคราว, และ tภูตผีปีศาจ+tหยุดชั่วคราว=ท. รอบการทำงานคืออัตราส่วนของระยะเวลาพัลส์ต่อคาบ - S \u003d tภูตผีปีศาจ/ท. แต่ในทางปฏิบัติ กลับกลายเป็นว่าสะดวกกว่าที่จะใช้ค่าส่วนกลับ - ตัวประกอบการเติม: D=1/S=T/tภูตผีปีศาจ. สะดวกยิ่งขึ้นในการแสดงปัจจัยการเติมเป็นเปอร์เซ็นต์
อะไรคือความแตกต่างระหว่าง PWM และ SIR
ในเอกสารทางเทคนิคต่างประเทศ ไม่มีความแตกต่างระหว่างการมอดูเลตความกว้างพัลส์และการควบคุมความกว้างพัลส์ (PWR) ผู้เชี่ยวชาญชาวรัสเซียพยายามแยกแยะระหว่างแนวคิดเหล่านี้ อันที่จริง PWM เป็นประเภทของการปรับ นั่นคือ การเปลี่ยนแปลงในสัญญาณพาหะภายใต้อิทธิพลของอีกสัญญาณหนึ่ง มอดูเลตหนึ่ง สัญญาณพาหะทำหน้าที่เป็นตัวพาข้อมูล และสัญญาณมอดูเลตจะตั้งค่าข้อมูลนี้ และการควบคุมความกว้างพัลส์คือการควบคุมโหมดโหลดโดยใช้ PWM
เหตุผลและการประยุกต์ใช้ PWM
หลักการของการปรับความกว้างพัลส์ใช้ใน ตัวควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสอันทรงพลัง. ในกรณีนี้ สัญญาณมอดูเลตความถี่ที่ปรับได้ (เฟสเดียวหรือสามเฟส) จะถูกสร้างขึ้นโดยเครื่องกำเนิดคลื่นไซน์กำลังต่ำและซ้อนทับบนพาหะในลักษณะแอนะล็อก เอาต์พุตเป็นสัญญาณ PWM ซึ่งป้อนไปยังคีย์ของกำลังที่ต้องการ จากนั้นคุณสามารถส่งลำดับผลลัพธ์ของพัลส์ผ่านฟิลเตอร์โลว์พาสได้ เช่น ผ่านวงจร RC อย่างง่าย และเลือกไซนูซอยด์ดั้งเดิม หรือคุณสามารถทำได้โดยปราศจากมัน - การกรองจะเกิดขึ้นตามธรรมชาติเนื่องจากความเฉื่อยของเครื่องยนต์ เห็นได้ชัดว่ายิ่งความถี่พาหะสูง รูปคลื่นสัญญาณเอาท์พุตก็จะยิ่งใกล้เคียงกับไซนูซอยด์ดั้งเดิมมากขึ้นเท่านั้น
คำถามที่เป็นธรรมชาติเกิดขึ้น - เหตุใดจึงเป็นไปไม่ได้ที่จะขยายสัญญาณของเครื่องกำเนิดทันทีเช่น ใช้ทรานซิสเตอร์ทรงพลัง? เนื่องจากองค์ประกอบควบคุมที่ทำงานในโหมดเชิงเส้นจะกระจายพลังงานระหว่างโหลดและคีย์ ในกรณีนี้ พลังงานที่สำคัญจะสูญเปล่าไปกับองค์ประกอบหลัก หากองค์ประกอบการควบคุมอันทรงพลังทำงานในโหมดคีย์ (trinistor, triac, ทรานซิสเตอร์ RGBT) พลังงานจะถูกกระจายไปตามกาลเวลา การสูญเสียจะลดลงมากและประสิทธิภาพจะสูงขึ้นมาก
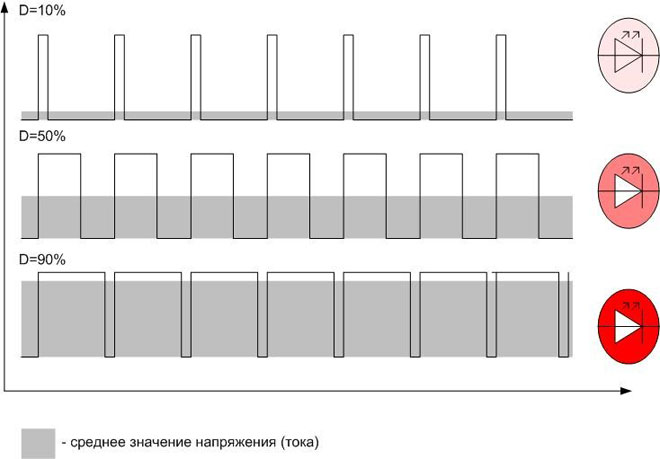
ในเทคโนโลยีดิจิทัล ไม่มีทางเลือกอื่นนอกจากการควบคุมความกว้างพัลส์ แอมพลิจูดของสัญญาณคงที่ที่นั่น แรงดันและกระแสสามารถเปลี่ยนได้โดยการปรับพาหะตามความกว้างพัลส์และหาค่าเฉลี่ยในภายหลัง ดังนั้น PWM ถูกใช้เพื่อควบคุมแรงดันและกระแสบนวัตถุเหล่านั้นที่สามารถหาค่าเฉลี่ยของสัญญาณพัลส์ การหาค่าเฉลี่ยเกิดขึ้นในรูปแบบต่างๆ:
- เนื่องจากความเฉื่อยของโหลดดังนั้นความเฉื่อยทางความร้อนของเครื่องทำความร้อนเทอร์โมอิเล็กทริกและหลอดไส้ช่วยให้วัตถุควบคุมไม่เย็นลงอย่างเห็นได้ชัดในช่วงหยุดชั่วคราวระหว่างพัลส์
- เนื่องจากความเฉื่อยของการรับรู้ LED มีเวลาที่จะออกจากชีพจรไปสู่การเต้นของชีพจร แต่สายตามนุษย์ไม่สังเกตเห็นสิ่งนี้และรับรู้ว่าเป็นแสงที่ส่องประกายอย่างต่อเนื่องโดยมีความเข้มต่างกันไป หลักการนี้ใช้เพื่อควบคุมความสว่างของจุดต่างๆ ของจอภาพ LED แต่ยังคงกะพริบตาถี่จนมองไม่เห็นด้วยความถี่หลายร้อยเฮิรตซ์ และทำให้ดวงตาเมื่อยล้า
- เนื่องจากความเฉื่อยทางกล คุณสมบัตินี้ใช้ในการควบคุมมอเตอร์กระแสตรงแบบมีแปรงถ่าน ด้วยความถี่ของการควบคุมที่เลือกไว้อย่างถูกต้อง มอเตอร์จึงไม่มีเวลาที่จะชะลอตัวลงในช่วงหยุดนิ่ง
ดังนั้นจึงใช้ PWM โดยที่ค่าเฉลี่ยของแรงดันหรือกระแสมีบทบาทชี้ขาด นอกเหนือจากกรณีทั่วไปที่กล่าวถึงแล้ว วิธี PWM ยังควบคุมกระแสไฟเฉลี่ยในเครื่องเชื่อมและเครื่องชาร์จแบตเตอรี่ เป็นต้น
หากไม่สามารถหาค่าเฉลี่ยตามธรรมชาติได้ ในหลายกรณี สามารถใช้ตัวกรองความถี่ต่ำที่กล่าวถึงแล้ว (LPF) ในรูปแบบของห่วงโซ่ RC สำหรับวัตถุประสงค์ในทางปฏิบัติ ก็เพียงพอแล้ว แต่ต้องเข้าใจว่า เป็นไปไม่ได้ที่จะแยกสัญญาณดั้งเดิมออกจาก PWM โดยใช้ตัวกรองความถี่ต่ำผ่านโดยไม่ผิดเพี้ยน ท้ายที่สุดแล้ว สเปกตรัม PWM มีฮาร์โมนิกจำนวนไม่สิ้นสุดที่จะตกลงไปใน passband ของตัวกรองอย่างหลีกเลี่ยงไม่ได้ ดังนั้น เราไม่ควรสร้างภาพลวงตาเกี่ยวกับรูปร่างของไซนัสที่ถูกสร้างใหม่
การควบคุม PWM RGB LED ที่มีประสิทธิภาพและประสิทธิผลมาก อุปกรณ์นี้มีจุดเชื่อมต่อ p-n สามจุด - แดง น้ำเงิน เขียวโดยการเปลี่ยนความสว่างของการเรืองแสงของแต่ละช่องสัญญาณแยกกัน คุณจะได้สีของไฟ LED ที่เรืองแสงได้เกือบทุกสี (ยกเว้นสีขาวล้วน) ความเป็นไปได้ในการสร้างเอฟเฟกต์แสงด้วย PWM นั้นไม่มีที่สิ้นสุด
การใช้งานทั่วไปที่สุดของสัญญาณดิจิตอลมอดูเลตความกว้างพัลส์คือการควบคุมกระแสเฉลี่ยหรือแรงดันไฟที่ไหลผ่านโหลด แต่การใช้การมอดูเลตประเภทนี้ที่ไม่ได้มาตรฐานก็เป็นไปได้เช่นกัน ทุกอย่างขึ้นอยู่กับจินตนาการของนักพัฒนา
บทความที่คล้ายกัน: