วิทยาศาสตร์ในสาขาไฟฟ้าในศตวรรษที่ 19 และ 20 พัฒนาอย่างรวดเร็วซึ่งนำไปสู่การสร้างมอเตอร์เหนี่ยวนำไฟฟ้า ด้วยความช่วยเหลือของอุปกรณ์ดังกล่าว การพัฒนาอุตสาหกรรมอุตสาหกรรมได้ก้าวไปข้างหน้าอย่างมาก และขณะนี้ เป็นไปไม่ได้ที่จะจินตนาการถึงโรงงานและโรงงานที่ไม่มีเครื่องจักรไฟฟ้าที่ใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัส
เนื้อหา
ประวัติการปรากฏตัว
ประวัติความเป็นมาของการสร้างมอเตอร์ไฟฟ้าแบบอะซิงโครนัสเริ่มต้นขึ้นในปี พ.ศ. 2431 เมื่อ นิโคลา เทสลา จดสิทธิบัตรวงจรมอเตอร์ไฟฟ้าในปีเดียวกันนักวิทยาศาสตร์อีกคนในสาขาวิศวกรรมไฟฟ้า กาลิเลโอ เฟอร์รารีส ตีพิมพ์บทความเกี่ยวกับลักษณะทางทฤษฎีของการทำงานของเครื่องอะซิงโครนัส
ในปี พ.ศ. 2432 นักฟิสิกส์ชาวรัสเซีย มิคาอิล โอซิโปวิช โดลิโว-โดโบรโวลสกี้ ได้รับสิทธิบัตรในประเทศเยอรมนีสำหรับมอเตอร์ไฟฟ้าสามเฟสแบบอะซิงโครนัส

สิ่งประดิษฐ์ทั้งหมดนี้ทำให้สามารถปรับปรุงเครื่องจักรไฟฟ้าและนำไปสู่การใช้เครื่องจักรไฟฟ้าอย่างมหาศาลในอุตสาหกรรม ซึ่งช่วยเร่งกระบวนการทางเทคโนโลยีทั้งหมดในการผลิตได้อย่างมาก เพิ่มประสิทธิภาพในการทำงาน และลดความเข้มของแรงงาน
ในขณะนี้ มอเตอร์ไฟฟ้าที่ใช้กันมากที่สุดในอุตสาหกรรมคือต้นแบบของเครื่องจักรไฟฟ้าที่สร้างโดย Dolivo-Dobrovolsky
อุปกรณ์และหลักการทำงานของมอเตอร์แบบอะซิงโครนัส
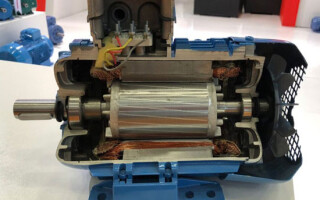
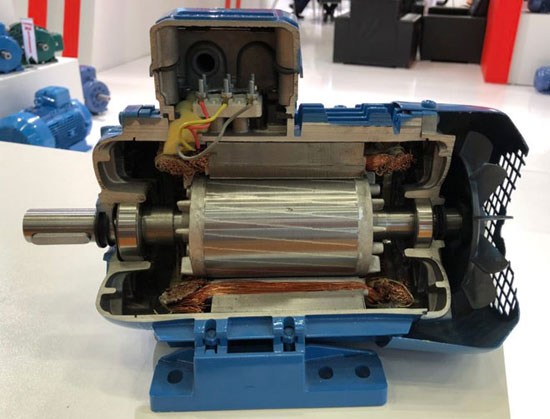
ส่วนประกอบหลักของมอเตอร์เหนี่ยวนำคือสเตเตอร์และโรเตอร์ซึ่งแยกออกจากกันด้วยช่องว่างอากาศ การทำงานแบบแอคทีฟในเครื่องยนต์นั้นดำเนินการโดยขดลวดและแกนกลางของโรเตอร์
ความไม่ตรงกันของเครื่องยนต์เป็นที่เข้าใจกันว่าเป็นความแตกต่างระหว่างความเร็วของโรเตอร์และความถี่ของการหมุนของสนามแม่เหล็กไฟฟ้า
สเตเตอร์ - เป็นชิ้นส่วนคงที่ของเครื่องยนต์ แกนทำจากเหล็กไฟฟ้าและติดตั้งในเฟรม เตียงทำแบบหล่อจากวัสดุที่ไม่ใช่แม่เหล็ก (เหล็กหล่อ อลูมิเนียม). ขดลวดสเตเตอร์เป็นระบบสามเฟสซึ่งวางสายไฟในร่องที่มีมุมโก่งตัว 120 องศา เฟสของขดลวดเชื่อมต่อกับเครือข่ายตามมาตรฐานตามรูปแบบ "ดาว" หรือ "สามเหลี่ยม"

โรเตอร์ เป็นส่วนที่เคลื่อนที่ของเครื่องยนต์ โรเตอร์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีสองประเภท: แบบกรงกระรอกและโรเตอร์แบบเฟส ประเภทนี้แตกต่างกันในการออกแบบขดลวดโรเตอร์
มอเตอร์กรงกระรอกแบบอะซิงโครนัส
เครื่องจักรไฟฟ้าประเภทนี้ได้รับการจดสิทธิบัตรครั้งแรกโดย M.O. Dolivo-Dobrovolsky และเรียกกันทั่วไปว่า "ล้อกระรอก" เนื่องจากรูปลักษณ์ของโครงสร้าง ขดลวดโรเตอร์ที่ลัดวงจรประกอบด้วยแท่งทองแดงที่ลัดวงจรด้วยวงแหวน (อลูมิเนียม ทองเหลือง) และสอดเข้าไปในร่องของขดลวดของแกนโรเตอร์ โรเตอร์ประเภทนี้ไม่มีหน้าสัมผัสที่เคลื่อนที่ ดังนั้นมอเตอร์เหล่านี้จึงมีความน่าเชื่อถือและทนทานในการใช้งาน
มอเตอร์เหนี่ยวนำที่มีเฟสโรเตอร์
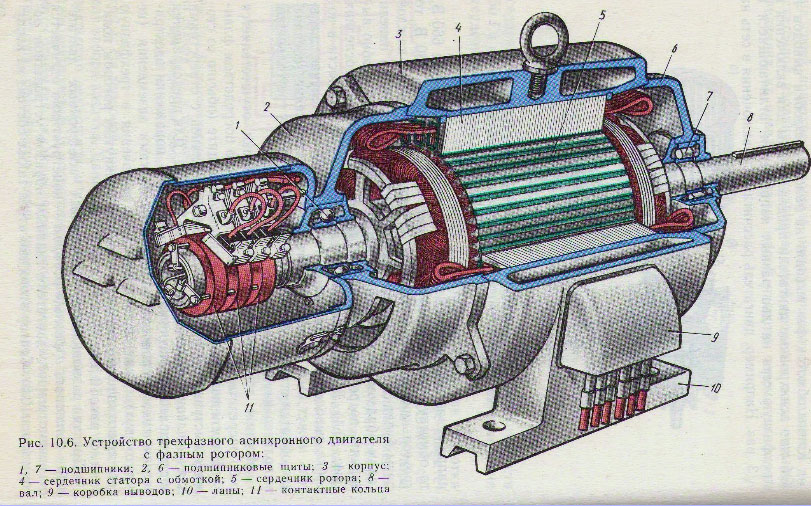
อุปกรณ์ดังกล่าวช่วยให้คุณสามารถปรับความเร็วในการทำงานได้หลากหลาย เฟสโรเตอร์เป็นขดลวดสามเฟสซึ่งเชื่อมต่อตามรูปแบบ "ดาว" หรือสามเหลี่ยม ในมอเตอร์ไฟฟ้าดังกล่าวมีการออกแบบแปรงพิเศษซึ่งคุณสามารถปรับความเร็วของโรเตอร์ได้ หากมีการเพิ่มลิโน่พิเศษเข้าไปในกลไกของเครื่องยนต์ดังกล่าว เมื่อสตาร์ทเครื่องยนต์ ความต้านทานแบบแอคทีฟจะลดลง และด้วยเหตุนี้กระแสเริ่มต้นจะลดลง ซึ่งส่งผลเสียต่อเครือข่ายไฟฟ้าและอุปกรณ์เอง
หลักการทำงาน
เมื่อกระแสไฟฟ้าถูกนำไปใช้กับขดลวดของสเตเตอร์ จะเกิดฟลักซ์แม่เหล็กขึ้น เนื่องจากเฟสจะเลื่อนสัมพันธ์กัน 120 องศา ด้วยเหตุนี้ กระแสในขดลวดจึงหมุนไป หากโรเตอร์เกิดการลัดวงจร กระแสจะปรากฎขึ้นในโรเตอร์ด้วยการหมุนดังกล่าว ซึ่งจะสร้างสนามแม่เหล็กไฟฟ้า สนามแม่เหล็กของโรเตอร์และสเตเตอร์ทำปฏิกิริยาซึ่งกันและกันทำให้โรเตอร์ของมอเตอร์ไฟฟ้าหมุน หากโรเตอร์เป็นเฟส แรงดันไฟฟ้าจะถูกนำไปใช้กับสเตเตอร์และโรเตอร์พร้อมกัน สนามแม่เหล็กจะปรากฏขึ้นในแต่ละกลไก พวกมันโต้ตอบกันและหมุนโรเตอร์
ข้อดีของมอเตอร์แบบอะซิงโครนัส
| กับโรเตอร์กรงกระรอก | ด้วยเฟสโรเตอร์ |
|---|---|
| 1. อุปกรณ์ง่าย ๆ และวงจรเปิด | 1. กระแสไฟเริ่มต้นเล็ก |
| 2. ต้นทุนการผลิตต่ำ | 2. ความสามารถในการปรับความเร็วในการหมุน |
| 3. เมื่อโหลดเพิ่มขึ้น ความเร็วของเพลาจะไม่เปลี่ยนแปลง | 3. ทำงานกับโอเวอร์โหลดขนาดเล็กโดยไม่เปลี่ยนความเร็ว |
| 4. สามารถทนต่อการโอเวอร์โหลดระยะสั้นได้ | 4. สามารถสตาร์ทอัตโนมัติได้ |
| 5. เชื่อถือได้และทนทานในการใช้งาน | 5. มีแรงบิดขนาดใหญ่ |
| 6. เหมาะกับทุกสภาพการทำงาน | |
| 7. มีประสิทธิภาพสูง |
ข้อเสียของมอเตอร์แบบอะซิงโครนัส
| กับโรเตอร์กรงกระรอก | ด้วยเฟสโรเตอร์ |
|---|---|
| 1. ความเร็วของโรเตอร์ไม่สามารถปรับได้ | 1. ขนาดใหญ่ |
| 2. แรงบิดเริ่มต้นเล็ก | 2. ประสิทธิภาพต่ำกว่า |
| 3. กระแสไฟเริ่มต้นสูง | 3. การบำรุงรักษาบ่อยครั้งเนื่องจากการสึกหรอของแปรง |
| 4. ความซับซ้อนในการออกแบบบางอย่างและการมีอยู่ของหน้าสัมผัสที่เคลื่อนไหว |
มอเตอร์แบบอะซิงโครนัสเป็นอุปกรณ์ที่มีประสิทธิภาพมากพร้อมคุณสมบัติทางกลที่ยอดเยี่ยม ซึ่งทำให้เป็นผู้นำด้านความถี่ในการใช้งาน
โหมดการทำงาน

มอเตอร์ไฟฟ้าแบบอะซิงโครนัสเป็นกลไกสากลและมีหลายโหมดตลอดระยะเวลาการทำงาน:
- ต่อเนื่อง;
- ในระยะสั้น;
- เป็นระยะ;
- ซ้ำระยะสั้น;
- พิเศษ.
โหมดต่อเนื่อง - โหมดหลักของการทำงานของอุปกรณ์อะซิงโครนัสซึ่งมีลักษณะการทำงานคงที่ของมอเตอร์ไฟฟ้าโดยไม่ต้องปิดเครื่องด้วยโหลดคงที่ โหมดการทำงานนี้เป็นโหมดที่ใช้กันทั่วไปในสถานประกอบการอุตสาหกรรมทุกแห่ง
โหมดชั่วขณะ - ทำงานจนกว่าจะถึงโหลดคงที่ในช่วงเวลาหนึ่ง (10 ถึง 90 นาที) ไม่มีเวลาวอร์มอัพให้มากที่สุด หลังจากนั้นจะปิด โหมดนี้ใช้เมื่อจ่ายสารทำงาน (น้ำ น้ำมัน แก๊ส) และสถานการณ์อื่นๆ
โหมดเป็นระยะ - ระยะเวลาของการทำงานมีค่าที่แน่นอนและถูกปิดเมื่อสิ้นสุดรอบการทำงาน โหมดการทำงาน เริ่ม-ทำงาน-หยุด ในขณะเดียวกันก็สามารถปิดได้ชั่วคราวในระหว่างที่ไม่มีเวลาเย็นลงจนถึงอุณหภูมิภายนอกแล้วเปิดใหม่อีกครั้ง
โหมดไม่ต่อเนื่อง - เครื่องยนต์ไม่ร้อนสูงสุด แต่ยังไม่มีเวลาเย็นลงจนถึงอุณหภูมิภายนอก ใช้ในลิฟต์ บันไดเลื่อน และอุปกรณ์อื่นๆ
ระบอบการปกครองพิเศษ - ระยะเวลาและระยะเวลาของการรวมเป็นข้อกำหนด
ในทางวิศวกรรมไฟฟ้า มีหลักการย้อนกลับของเครื่องจักรไฟฟ้า ซึ่งหมายความว่าอุปกรณ์นี้สามารถแปลงพลังงานไฟฟ้าเป็นพลังงานกลและดำเนินการตรงกันข้ามได้
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสยังสอดคล้องกับหลักการนี้และมีโหมดการทำงานของมอเตอร์และเครื่องกำเนิดไฟฟ้า
โหมดมอเตอร์ - โหมดหลักของการทำงานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส เมื่อแรงดันไฟฟ้าถูกนำไปใช้กับขดลวด แรงบิดแม่เหล็กไฟฟ้าจะเกิดขึ้น ลากโรเตอร์ด้วยเพลาและทำให้เพลาเริ่มหมุน เครื่องยนต์ถึงความเร็วคงที่และทำงานที่มีประโยชน์
โหมดเครื่องกำเนิดไฟฟ้า - ตามหลักการกระตุ้นของกระแสไฟฟ้าในขดลวดของมอเตอร์ระหว่างการหมุนของโรเตอร์ หากมอเตอร์โรเตอร์หมุนด้วยกลไก แรงเคลื่อนไฟฟ้าจะเกิดขึ้นบนขดลวดสเตเตอร์ เมื่อมีตัวเก็บประจุในขดลวด จะเกิดกระแสคาปาซิทีฟหากความจุของตัวเก็บประจุเป็นค่าหนึ่ง ขึ้นอยู่กับลักษณะของเครื่องยนต์ เครื่องกำเนิดไฟฟ้าจะกระตุ้นตัวเองและระบบแรงดันไฟฟ้าสามเฟสจะปรากฏขึ้น ดังนั้นมอเตอร์กรงกระรอกจะทำงานเป็นเครื่องกำเนิดไฟฟ้า
การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส
ในการควบคุมความเร็วของการหมุนของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสและควบคุมโหมดการทำงาน มีวิธีการดังต่อไปนี้:
- ความถี่ - เมื่อความถี่ของกระแสในเครือข่ายไฟฟ้าเปลี่ยนแปลง ความถี่ของการหมุนของมอเตอร์ไฟฟ้าจะเปลี่ยนไป สำหรับวิธีนี้จะใช้อุปกรณ์ที่เรียกว่าเครื่องแปลงความถี่
- รีโอสแตติก - เมื่อความต้านทานของรีโอสแตทในโรเตอร์เปลี่ยนแปลง ความเร็วในการหมุนจะเปลี่ยนไป วิธีนี้จะช่วยเพิ่มแรงบิดในการสตาร์ทและสลิปวิกฤต
- พัลส์ - วิธีการควบคุมที่ใช้แรงดันไฟฟ้าชนิดพิเศษกับมอเตอร์
- การสลับขดลวดระหว่างการทำงานของมอเตอร์ไฟฟ้าจากวงจร "ดาว" เป็นวงจร "สามเหลี่ยม" ซึ่งจะช่วยลดกระแสเริ่มต้น
- การควบคุมการเปลี่ยนขั้วคู่สำหรับโรเตอร์กรงกระรอก
- การเชื่อมต่อของรีแอกแตนซ์อุปนัยสำหรับมอเตอร์ที่มีโรเตอร์แบบกรอนด์
ด้วยการพัฒนาระบบอิเล็กทรอนิกส์ การควบคุมมอเตอร์ไฟฟ้าแบบอะซิงโครนัสต่างๆ จึงมีประสิทธิภาพและแม่นยำยิ่งขึ้น เครื่องมือดังกล่าวถูกใช้ทุกที่ในโลก ความหลากหลายของงานที่ทำโดยกลไกดังกล่าวเพิ่มขึ้นทุกวัน และความต้องการใช้งานไม่ได้ลดลง
บทความที่คล้ายกัน: